132-8780-6732
水下机器人分类与场景赋能
海洋覆盖地球71%的表面积,95%以上的深海区域仍是人类未触及的未知地带。高压、无光、低温、强腐蚀的极端环境,限制了人类直接作业的可能,也让水下机器人成为探索海洋的核心工具。作为人类延伸向深海的“感知终端与执行载体”,水下机器人广泛应用于科研勘探、油气开发、海底矿产、国防军事、打捞救援、环境监测等领域,是现代海洋工程不可或缺的关键装备。
水下机器人主要分为四类:ROV(遥控带缆式)、AUV(自主无缆式)、UUV(无人无缆水下航行器)、TUV(拖曳式)
四类水下机器人特点、优缺点及应用
一、ROV 遥控带缆式水下机器人
• 特点:依靠脐带缆连接水面平台,人工实时操控,线缆同步完成供电、信号与数据传输,可定点悬停,支持搭载各类作业工具。
• 优点:续航无上限,信号传输稳定,操控精度高,负载能力强,能完成复杂机械作业,实时画面回传。
• 缺点:活动范围受缆长限制,机动性弱,线缆易缠绕,部署与收放流程复杂。
• 应用:海上风电基础检测、海底管线检修、船底清洁、水下打捞、大坝/桥墩探伤、水下设备安装维修。
二、AUV 自主无缆式水下机器人
• 特点:无缆设计,内置电池与导航系统,按预设程序自主航行作业,全程无需人工实时干预。
• 优点:机动灵活,巡航范围广,隐蔽性好,适合大范围区域作业,部署简便。
• 缺点:续航受电池制约,无法执行复杂机械手作业,作业中难以临时调整任务。
• 应用:海底地形测绘、海洋水文监测、近海环境普查、鱼群观测、水下目标搜寻。
三、UUV 无人无缆水下航行器
• 特点:大型深海级无缆装备,耐压等级高,集成长距离导航、通信与多组探测模块,主打大深度、长航程航行。
• 优点:下潜深度大、续航里程远、抗复杂海况能力强,载荷空间大,可执行跨海域任务。
• 缺点:设备造价高昂,技术门槛高,维修难度大,同样受电池限制,无法精细化作业。
• 应用:深海资源勘探、长距离海底管线巡检、深海地质监测、远海海洋环境探测。
四、TUV 拖曳式水下机器人
• 特点:由水面船舶拖曳前行,结构简易,依托船舶动力移动,主要搭载探测类仪器,匀速带状作业。
• 优点:成本低、稳定性强、数据采集连续,运维简单,可长时间连续探测,作业覆盖均匀。
• 缺点:航行路线完全依附母船,无法独立机动,难以进入狭小、复杂水域,作业功能单一。
• 应用:航道测绘、近海障碍物排查、带状海域环境监测、疏浚工程检测、近岸海底普查。
不同类型的机器人适配不同作业场景,覆盖全链条海洋工程需求:
• 海洋科研:深海生物采样、海底地形测绘、热液喷口探测
• 油气开发:平台水下检测、管道/立管检测、水下结构物安装
• 海底矿产:多金属结核、富钴结壳、多金属硫化物勘探
• 国防军事:水雷探测与清除、潜艇侦察、海底监听网部署
• 打捞救援:失事飞机黑匣子搜索、沉船探测、人员搜救
• 水下考古:古代沉船遗址探测、水下文物提取
• 环境监测:珊瑚礁监测、海洋垃圾追踪、溢油监测
• 渔业养殖:网箱检测、鱼群评估、饲料投放监测
• 海底通信:海底光缆检测与维修、水下通信网络部署
• 海上风电:风机基础检测、海底电缆检测、桩基冲刷监测

最新文章

尼日利亚部级代表团到访方得海洋
尼日利亚联邦政府部级高官代表团一行,在中国机械对外经济技术合作有限公司(英文简称CMIC)核心团队的陪同下,专程莅临我司考察调研,实地体验并深度测评公司自主研发的海洋智能装备
热销出圈:深水广角网络摄像机批量发货
125°真正水下大广角镜头,突破常规水下摄像头视野狭窄的弊端,可实现大范围水域全景监测,大幅减少监控盲区。同时内置专业图像校正算法,完美解决鱼眼镜头常见的画面拉伸、变形问题,实现画面无畸变、视野更规整,全景画面真实还原水下场景全貌。

ROV软件界面,我们看水下世界的窗户
一款优秀的ROV控制系统界面,不仅是操作指令的载体,更是操作员与水下设备之间的“桥梁”。以威海方得海洋科技的ROV控制系统界面为例,其模块化、高集成度的设计,为复杂水下作业提供了清晰、高效、安全的操控保障,展现了现代海洋装备软件界面的卓越优势。

FD-AC-02B21深水高倍SDI变焦摄像机
FD-AC-02B21深水10倍SDI变焦摄像机,支持10倍光学变焦+12倍数字变焦,是专为深海复杂环境打造的高性能可视化设备,以高清成像、深度耐压与稳定传输为核心优势,为水下机器人作业、深海科考、海洋工程等场景提供可靠的视觉支持。
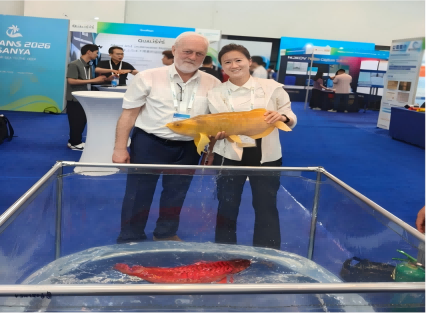
OCEANS 2026 Sanya展会,金鳞成全场焦点
2026年5月25-28日,OCEANS 2026 Sanya国际海洋技术大会在三亚湾红树林国际会展中心盛大启幕。我们的智能软体仿生金龙鱼的现场动态演示,成为本次展会最受瞩目的亮点之一。


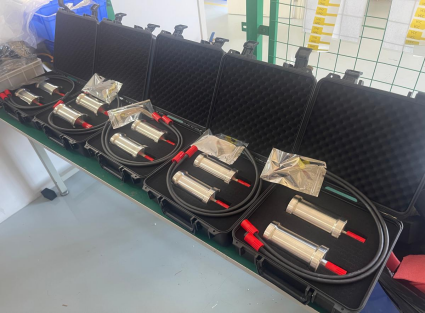
我司顺利交付客户定制款钛合金带灯水下摄像机
设备整机采用高强度钛合金材质外壳打造,具备超强抗压、防腐、耐磨性能,防水深度可达300米,可轻松应对深海、近海、水产养殖、水下工程勘测等多种严苛深水作业环境。

水下智能装备的核心研发与应用价值
相较于人工潜水,水下装备可长时间在水下连续值守、不间断作业,不受深水水压、恶劣水下环境的限制,既能保障作业人员的生命安全,规避潜水作业安全风险,又能大幅降低人工、设备租赁、后勤保障等作业成本。





contact us
李经理:132-8780-6732
王经理:158-5465-8979
地址:山东威海高新区智能装备产业园福田路10-4号
本站部分内容来源于网络,如果您认为我们侵犯了您的版权请告知,我们将立即删除
备案号:鲁ICP备2024116257号-1